UNIST site map
- Admissions
-
Academics
- Colleges and Schools
-
Academic Affairs
- Academic Calendar
- Academic Curriculum
- Requirements for Graduation
- Browse Open Courses
- Undergraduate Administration
-
Graduate Academic Affairs
- Tuition Fee Payment
- Academic Leave of Absence/ Academic Return
- Voluntary Withdrawal/ Expulsion
- Change of Major
- Change of Degree Program/ Dropping of Degree Program
- Class Period/ Attendance Period/ Academic Year・Semester
- Course Registration
- Course Drop
- Attendance/ Grade/ Exam
- Credit Transfer/ Credit Carryover
- Academic Forms
- Education Support
-
Research/Industry
- Research Aims
- Research Findings
- Researcher Search
-
Research Organizations
- UNIST Multi-Interdisciplinary Institute
- IBS Research Groups
-
UNIST Labs
- Department of Mechanical Engineering
- School of Energy and Chemical Engineering
- Department of Civil
- Department of Materials Science and Engineering
- Department of Nuclear Engineering
- Department of Industrial Engineering
- Department of Design
- Department of Biomedical Engineering
- Department of Biological Sciences
- Department of Electrical Engineering
- Department of Computer Science and Engineering
- Department of Mathematical Sciences
- Department of Chemistry
- Department of Physics
- School of Business Administration
- Graduate School of Carbon Neutrality
- Graduate School of Artificial Intelligence
- Research Support
- University-Industry Relations
- Campus Life
- News Center
- About UNIST
-
etc
- UNIST Bulletin
- Work-Life Balance Support System
- UNIST Gender Equality Plan
- Faculty Invitation for Tenure Track
- Faculty Invitation for Non-Tenure Track
- Board Meeting Minutes
- University Council Meeting Minutes
- Administrative Service Charter
- Privacy Policy
- Copyright Policy
- Rejection of Unauthorized Email Collection
- Operation and Management Policy for Video Information Processing Devices
- Information Disclosure


Connection Points of Knowledge, Everything About UNIST
Try searching.
Recommended search terms








- portal
- U Academics Innovation Center
- Leadership Center
- Dormitory
- Academic Information Center
- International Students Support
- Browse Open Courses
- Course Registration
- Graduation Requirements for Graduation
- Academic Leave of Absence/ Academic Return
- Military Service
- Certificate Issuance
- Academic Calendar
- Scholarships
- Campus Map
- Campus Life Guidebook
- Health Care Center
- Human Rights Center
- portal
- Job Opening
- Announcement for Bid
- UNIST AI Services
- UNIST Daycare Center
- Sports Center
- UI Downloads
- Announcement
- Recruitment of Professors (Non-tenure)
- Faculty Invitation for Tenure Track
- UNIST Academic Information Center
- Office of Research Facilities and Training
- Office of Research Affairs
- Rule Management System
- Academic Calendar
![]()
![]()
This is a collection of menus necessary for UNIST students .
students
- portal
- U Academics Innovation Center
- Leadership Center
- Dormitory
- Academic Information Center
- International Students Support
- Browse Open Courses
- Course Registration
- Graduation Requirements for Graduation
- Academic Leave of Absence/ Academic Return
- Military Service
- Certificate Issuance
- Academic Calendar
- Scholarships
- Campus Map
- Campus Life Guidebook
- Health Care Center
- Human Rights Center
![]()
![]()
This is a collection of menus necessary for prospective UNIST Students .
prospective Students
![]()
![]()
This is a collection of menus necessary for UNIST Faculty & Staff .
Faculty & Staff
- portal
- Job Opening
- Announcement for Bid
- UNIST AI Services
- UNIST Daycare Center
- Sports Center
- UI Downloads
- Announcement
- Recruitment of Professors (Non-tenure)
- Faculty Invitation for Tenure Track
- UNIST Academic Information Center
- Office of Research Facilities and Training
- Office of Research Affairs
- Rule Management System
- Academic Calendar


NEWS CENTER
Discover not only Research Findings and event news, but also the diverse facets of UNIST presented by reporters and writers.
News Center

UNIST News
New Study Unveils Precise Calibration Method for Event Cameras in Autonomous Systems
Selected as a Highlight of the 2026 CVPR, this study pushes forward the capabilities of high-speed sensing in dynamic environments.
- Research
- JooHyeon Heo
- 2026.06.05
- 297

Abstract
A research team affiliated with UNIST has introduced a new calibration technique for event cameras—an essential sensor for high-speed robotics and autonomous vehicles. Unlike conventional methods, this approach uses standard checkerboard patterns to calibrate the sensors directly from event data, eliminating the need for image reconstruction.
Event cameras detect only changes in brightness at individual pixels, enabling rapid perception in challenging conditions, such as low light or fast motion. However, calibrating these sensors—particularly with common checkerboard targets—has been problematic because the key points at the intersections of black and white squares rarely produce detectable events.
Led by Professor Kyungdon Joo from UNIST's Graduate School of Artificial Intelligence, the team developed a computer vision approach that bypasses this challenge. Instead of locating checkerboard corners directly within event data, the method first detects the pattern's boundary lines. It then identifies the corners as intersections where these lines meet and where minimal activity occurs—since brightness changes cancel out at intersections. This insight, grounded in the mathematical behavior of event signals, enables precise corner detection without converting event data into traditional images.
The team also improved the clarity of the detected grid. Because event signals are recorded asynchronously across pixels, slight movements can cause the pattern to blur. Their technique aligns and refines these signals, reconstructing sharp grid lines and significantly enhancing calibration accuracy.

Furthermore, the method extends to AprilTags—square fiducial markers similar to QR codes used for localization. It can identify and decode these tags solely from event data, even when some are partially obscured or outside the camera's field of view.
First author Taehun Ryu explains, “Previous methods had to convert event data into grayscale images to find corners, which could introduce blurring and errors. Our approach directly extracts reference points from raw signals, greatly improving calibration precision.”
Professor Joo highlights the broader significance, “Accurate camera calibration is fundamental to many vision systems. Our work paves the way for deploying event cameras in real-world robots and vehicles.”
The study has been selected as a Highlight at the 2026 Conference on Computer Vision and Pattern Recognition (CVPR), scheduled for June 3–7 in Denver, USA. Only about 3.5% of submissions earn this recognition, which honors outstanding contributions to the field. The research was supported by the Institute of Information & Communications Technology Planning & Evaluation (IITP), the Ministry of Science and ICT (MSIT), the National Research Foundation of Korea (NRF), and UNIST's Graduate School of Artificial Intelligence. Additional support came from projects including the Development of AI Bots Collaboration Platform and Self-organizing and the Geometric and Physical Commonsense Reasoning based Behavior Intelligence for Embodied AI .
Journal Reference
Taehun Ryu, Changwoo Kang, and Kyungdon Joo, "From Corners to Fiducial Tags: Revisiting Checkerboard Calibration for Event Cameras," '26 CVPR, (2026).
Related Links
Related Photo







-
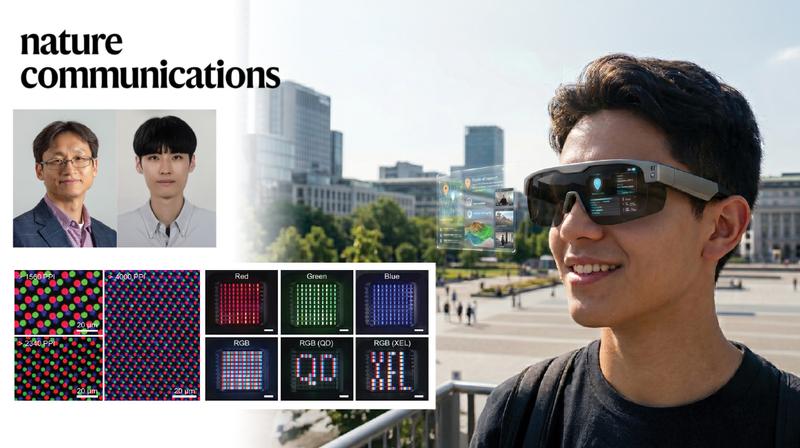
Breakthrough QD Display Technology Achieves 4,000 PPI Resolution — Ideal for XR Glasses
-
New Study Unveils Adaptive AI Breakthrough for Reflection Separation in the Wild
-
New Study Mathematically Defines Key Conditions for Improving AI Model Robustness through Data Augmentation
-
Novel AI Approach for Single-Image-Based 3D Character Animation with Preserved Proportions